


ソーラーボートプロジェクト支援基金
ソーラーボートプロジェクトとは
「ソーラーボート」とは、船体につけた太陽光パネルで生み出したエネルギーを動力にしたボートです。
本プロジェクトでは、学生が、デジタルツイン・シミュレーション環境を構築しながら、一人乗りソーラーボートを設計・製作(モデルベース開発)し、国内外の大会に出場することを目指します。参加学生は様々なバックグラウンドをもち、ソーラーボートを制作するという共通のゴールを目標に専攻の垣根を超えて活動しています。
※本プロジェクトは、社会連携講座「海事デジタルエンジニアリング講座(MODE)」内の教育活動の一環であるとともに、工学部・工学系研究科が開講する「創造的ものづくりプロジェクト」及び「創造性工学プロジェクト」内の活動として位置づけられています。
「デジタルツイン・シミュレーション」とは?
設計や開発において、モデルベースシステムズエンジニアリング(MBSE*)とモデルベース開発(MBD*)を用いてデジタルツイン・シミュレーション環境を構築することで、初期設計から運用まで比較的短期間で実施することができます。
本プロジェクトでは、設計プロセスにおいて、大会で好成績を収めるための要件や機能を、MBSEを用いて抽出しMBDにより物理的な挙動を再現できるデジタルツインを作成します。
*MBSE:複雑なシステムをモデル化して整理した形で可視化し、複数の分野が連携して要求分析から検証まで開発工程を進めること。
*MBD:システム構成要素の機能を数値モデルとして表現し、シミュレーションによって条件を変えながら動作を繰り返し確認して最適化を目指す設計・開発手法。
詳しくはこちら▶https://mode.k.u-tokyo.ac.jp/about-mode/
国内大会での総合優勝を達成し、
目指すは・・・モナコ!
この経験を通じて、学生たちが船舶の設計・開発、デジタル環境を用いたシミュレーションの実務、プロジェクトマネジメント等に関する知識やスキルを身につけることを目標としています。
そして、 2024年7~9月に開催予定の国内大会での総合優勝、さらには2025年7月上旬にモナコで開催されるMonaco Energy Boat Challengeへの出場、総合3位以内を目標に掲げて、日々邁進しています。

Monaco Energy Boat Challenge の様子
ご支援のお願い ~学生からのメッセージ~
どの大会においても、上位勢は水中翼船で勝負しており、本プロジェクトでも水中翼のついたソーラーボートを製作する必要がありますが、水中翼のついたソーラーボートを製作するためには、船体製作費用に加えて、ソーラーパネル購入費用、水中翼製作費用など通常の船体以上の費用を要します。また、国内外で開催される大会に出場するためには、運搬・移動等に多額の費用が必要です。十分な費用がない場合、残念ながら出場自体が困難になります。
これらの資金を、研究室・工学部からの補助や学生個人の負担でまかなうことには限界があるため、より多くの方にご支援いただくことで、プロジェクトの目標を達成したいと願っています。
ご寄付の使途
いただいたご寄付は、以下の活動に使用させていただきます。
- 船体製造費、翼・支柱製造費
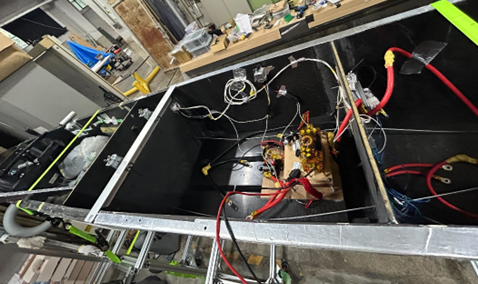
- 電気システム、推進システム・舵製造費
- 船体運搬費、現地活動費(渡航費を含む)
- 国内外への大会参加費

みなさまからの温かいご支援をどうぞよろしくお願いいたします。
船体を製造するのには時間と費用がかかるため、各大会毎に一隻しか作れない、、、
→デジタルツールを駆使して活動しています!
・Fusion360を使ったCAD(Compute Aided Design)による船体設計
・OpenVSPを用いたCFD(Computer Fluid Dynamics)による船体や水中翼の流体解析
・Matlab/Simulinkによる船全体のモデル化、システムの最適化
今後デザインを確定させ、船体の製造に取り組みます!
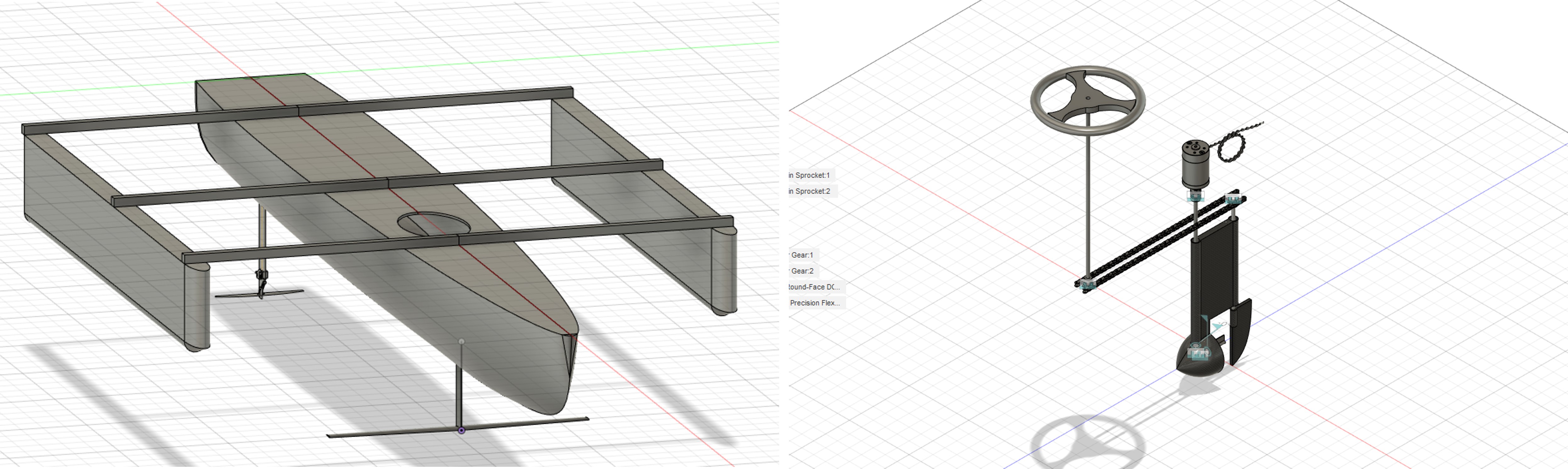
Fusion360を用いた船体やラダーの設計
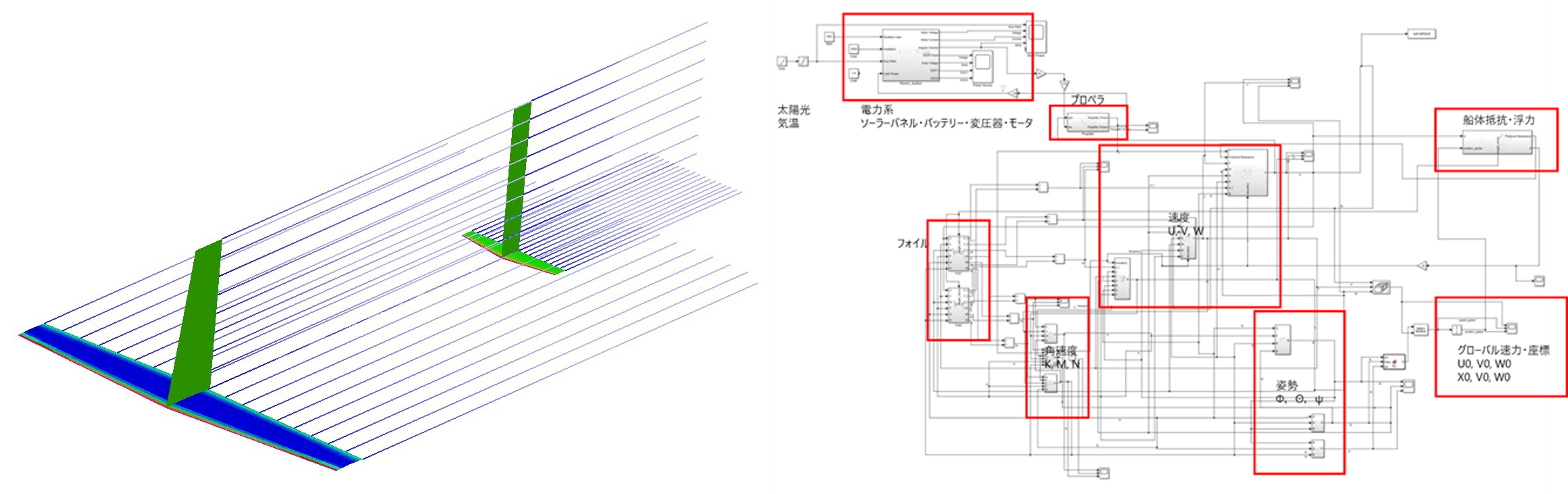
(左)OpenVSPを用いた水中翼の流体解析 / (右)Matlab/Simulinkを用いた船体全体のモデル化
→デジタルツールを駆使して活動しています!
・Fusion360を使ったCAD(Compute Aided Design)による船体設計
・OpenVSPを用いたCFD(Computer Fluid Dynamics)による船体や水中翼の流体解析
・Matlab/Simulinkによる船全体のモデル化、システムの最適化
今後デザインを確定させ、船体の製造に取り組みます!
関連リンク
社会連携講座「海事デジタルエンジニアリング講座(MODE)」
https://mode.k.u-tokyo.ac.jp/
村山研究室
http://www.gisolab.t.u-tokyo.ac.jp/murayama_lab
経過報告
ソーラー・人力ボートレース全日本選手権大会でソーラーAクラス総合準優勝・会長特別賞を受賞しました!
2026年03月13日(金)
〇2025ソーラー・人力ボートレース全日本選手権大会
・大会の概要
ソーラー・人力ボート全日本選手権大会では、①スピードレース(予選:100m、本選:200m)、②一周スラロームレース、③1時間耐久周回レースが行われ、その総合成績を競いました。
・大会成績
東京大学ソーラーボートレーシングは、ソーラーAクラスで総合準優勝し、会長特別賞を受賞しました。2024年は操舵ワイヤーの切断やスラスターの不具合が発生し棄権という結果でしたが、今年度は完走を達成し、大きくステップアップする形となりました。

〇大会に向けた活動
・操縦系・推進系の性能評価及び改良
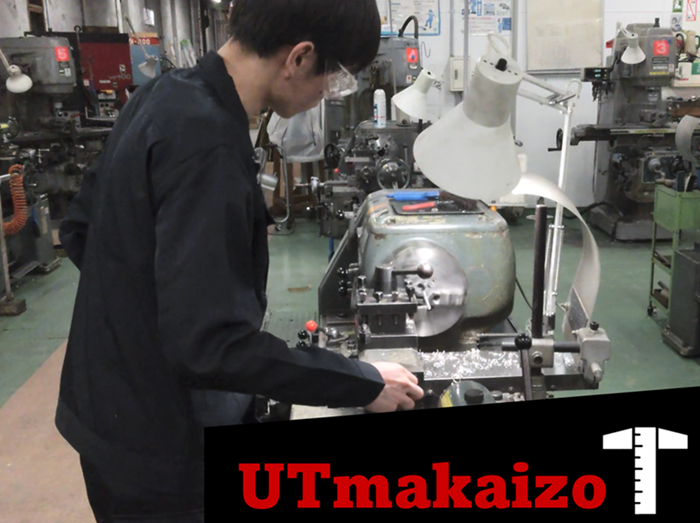
昨年度の大会で課題となった操縦系・推進系の改善に向けて試行錯誤が行われました。推進系では、プロペラによって発生する軸系のトルクに耐えるために最適化した構造の設計、固定方法の見直しなどを行いました。操縦系では、ワイヤーの調整やペダルの補修など、操縦に必要な改善を行いました。
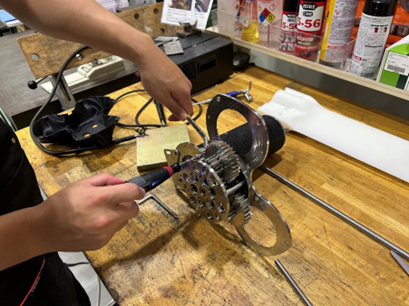
・プロペラの新規設計・製造・性能評価
さらに、推進力を強化するために2枚羽構造を選択し、樹脂製とアルミ製のものを作成しましたが、ベベルギアの耐久性の関係から、大会では樹脂製のプロペラを使用しました。
・Driver-in-the-loopの実現
仮想環境における操縦試験を行えるシミュレータが製作されました。仮想環境において、船体は6DOFが実現されており、コンピュータに接続したハンドルやペダルの動きに対して応答し、仮想環境上に再現された大会のコースを航行することができます。
〇主な活動記録
4月 今年度チーム結成
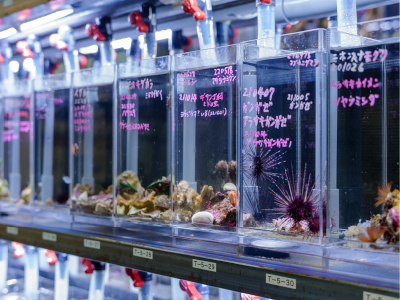
5月 陸上実験@船型試験水槽2階202号室
6月 陸上実験@船型試験水槽2階202号室
7月 陸上実験@船型試験水槽2階202号室
8月 水槽実験@船型試験水槽
9月 水槽実験@船型試験水槽
10月 海上実験@沼津
11月 海上実験@沼津
12月 ソーラー・人力ボート全日本選手権大会@浜名湖
1月 報告書作成・5月祭等イベント準備
2月 報告書作成・学生団体設立準備
3月 支援者へのプレゼン・学生団体設立準備
・水槽実験
本郷の船型試験水槽にて実際に船体を浮かべて実験を行いました。
取得したデータは、設計や統合シミュレーション環境の改良に活用されました。

・海上実験
沼津港にて、以下の内容の実験を行いました。
①船検
低速度での操縦安定性を確認。想定通りに動作させることができました。
②スロットル半分試験
・中速域における直進・旋回・スラロームを行い,推力・操舵力・電流負荷の関係を評価。
・フラッペロンを軽く操作して迎角応答を確認し、停止試験により慣性・抵抗特性を把握。
・試験後に速度・方位・加速度・電流電圧・舵角・フラッペロン角の解析結果からトルクや電流値が設計上妥当かを確認。
③フルスロットル試験
最高出力域における性能及び安定性の確認。電圧に対して電流が過大となり、大きなトルクがかかったギアが破損するという課題が発見された。取得したデータは、シミュレーションに反映し、シミュレータが改善されました。


〇寄付の使途
ソーラーボートの材料・製作費に使用させていただきました。
技術的ボトルネックとなっている推進系の再設計に注力し、最大の課題である翼走の実現に取り組んでいきます。 長期的には、実艇とシミュレータを同期させる『デジタルツイン』の手法を導入し、自律運航やリモートコントロールの達成を視野に入れています。 こうした開発を通じて取得したデータを統合シミュレータへ還元し、MBSE/MBDに基づく設計・検証ループを開発プロセスの基盤として定着させていく方針です。 また、組織運営について、技術の継承のため、本活動を学生団体として組織する作業を進めています。
2025年活動報告
-ソーラー・人力ボートレース全日本選手権大会でソーラーAクラス総合準優勝・会長特別賞を受賞しました!-
2026年02月05日(木)
1. 今年度の活動
1.1 ソーラー・人力ボートレース全日本選手権大会
1.1.1 大会の概要
ソーラー・人力ボート全日本選手権大会では、①スピードレース(予選:100m、本選:200m)、②一周スラロームレース、③1時間耐久周回レースが行われ、その総合成績を競いました。
1.1.2 大会成績
東京大学ソーラーボートレーシングは、ソーラーAクラスで総合準優勝し、会長特別賞を受賞しました。昨年度は操舵ワイヤーの切断やスラスターの不具合が発生し棄権という結果でしたが、今年度は完走を達成し、大きくステップアップする形となりました。

1.2 大会に向けた活動
1.2.1 操縦系・推進系の性能評価及び改良
昨年度の大会で課題となった操縦系・推進系の改善に向け試行錯誤が行われました。推進系では、プロペラによって発生する軸系のトルクに耐えるためのにを最適化した構造の設計、固定方法の見直しなどを行いました。操縦系では、ワイヤーの調整やペダルの補修など、操縦に必要な改善を行いました。
1.2.2 プロペラの新規設計・製造・性能評価
さらに、推進力を強化するために2枚羽構造を選択し、樹脂製とアルミ製のものを作成しましたが、ベベルギアの耐久性の関係から、大会では樹脂製のプロペラを使用しました。
1.2.3 Driver-in-the-loopの実現
仮想環境における操縦試験を行えるシミュレータが製作されました。仮想環境において、船体は6DOFが実現されており、コンピュータに接続したハンドルやペダルの動きに対して応答し、仮想環境上に再現された大会のコースを航行することができます。
2. 主な活動記録
4月 今年度チーム結成
5月 陸上実験@船型試験水槽2階基地
6月 陸上実験@船型試験水槽2階基地
7月 陸上実験@船型試験水槽2階基地
8月 水槽実験@船型試験水槽
9月 水槽実験@船型試験水槽
10月 海上実験@沼津
11月 海上実験@沼津
12月 ソーラー・人力ボート全日本選手権大会
1月
2月
3月
・水槽実験
本郷の船型試験水槽にて実際に船体を浮かべて実験を行いました。
取得したデータは、設計や統合シミュレーション環境の改良に活用されました。

・海上実験
沼津港にて、以下の内容の実験を行いました。
①船検
低速度での操縦安定性を確認。想定通りに動作させることができた。
②スロットル半分試験
・中速域における直進・旋回・スラロームを行い,推力・操舵力・電流負荷の関係を評価。
・フラッペロンを軽く操作して迎角応答を確認し、停止試験により慣性・抵抗特性を把握。
・試験後に速度・方位・加速度・電流電圧・舵角・フラッペロン角の解析結果からトルクや電流値が設計上妥当かを確認。
③フルスロットル試験
最高出力域における性能及び安定性の確認。電圧に対して電流が過大となり、大きなトルクがかかったギアが破損するという課題が発見された。
取得したデータは、シミュレーションに反映し、シミュレータが改善されました。


3. 今後の展望
技術的ボトルネックとなっている推進系の再設計に注力し、最大の課題である翼走の実現に取り組んでいきます。 長期的には、実艇とシミュレータを同期させる『デジタルツイン』の手法を導入し、自律運航やリモートコントロールの達成を視野に入れています。 こうした開発を通じて取得したデータを統合シミュレータへ還元し、MBSE/MBDに基づく設計・検証ループを開発プロセスの基盤として定着させていく方針です。
また、組織運営について、技術の継承のため、本活動を学生団体として組織する作業を進めています。
2024年活動報告
-ソーラー・人力ボート全日本選手権大会に出場しました!-
2025年02月20日(木)

東京大学のソーラーボートチームは、新領域創成科学研究科および複数の工学系研究科の学生で構成され、太陽光を動力源とするボートの設計・製造に取り組んでいます。
本年度の主なプロジェクトは、「YATAGARASU」と名付けられた新型ソーラーボートの開発でした。
本年度の主なプロジェクトは、「YATAGARASU」と名付けられた新型ソーラーボートの開発でした。
【設計と特徴】
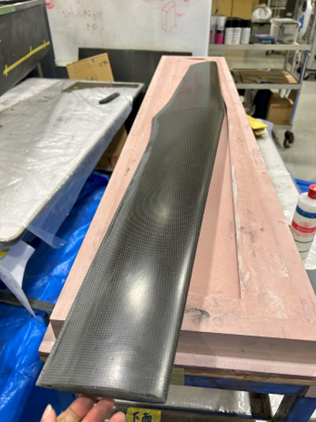
「YATAGARASU」は全長4.0m、全幅2.4m、重量90kgのトリマラン型水中翼付きソーラーボートです。船体及び主翼と尾翼には炭素繊維強化プラスチック(CFRP)を使用し、240W級太陽電池2枚と500W級ブラシ付きDCモーターを装備しています。
【製作プロセス】
船体製作: 雄型の作成、硬質ウレタンフォームの削り出し、CFRPによる積層、離型処理などを含む複数ステップを経て製作。
翼と操縦系: CNC型と3Dプリンタ型を使い製作しました。操縦系は自転車のパーツなどを使いました。 推進系: モーターと電装部品の組立、本郷キャンパスの船型試験水槽でテストを実施しました。
【大会成績と課題】
9月のソーラー・人力ボート全日本選手権大会では、100m/200mスプリントとスラローム、1時間耐久周回レースに参加。操舵ワイヤーの切断やスラスターの不具合が発生した棄権となったものの、貴重なデータと経験を得ることができました。
【今後の展望】
技術開発: 翼走と旋回式スラスターの検証、水槽を活用したシステム検証を計画しています。 システム工学の応用: SysMLとMBSE/MBDを用いた開発プロセスの改善と、CAD/CAE/PLMツールの活用を進め、プロジェクトの効率化と技術の向上を目指します。
この一年間で得られた知見と経験を生かして、来年以降さらなる挑戦を行っていきます。
引き続きご支援とご期待を賜りますようお願い申し上げます。




関連プロジェクト









































































新しい推進機構が見たいです
<ソーラーボートプロジェクト支援基金>
<ソーラーボートプロジェクト支援基金>
<ソーラーボートプロジェクト支援基金>
<ソーラーボートプロジェクト支援基金>
<ソーラーボートプロジェクト支援基金>
<ソーラーボートプロジェクト支援基金>
<ソーラーボートプロジェクト支援基金>
今年も8月に琵琶湖(E/SASV Games)でお会いできますこと、楽しみにしております。
<ソーラーボートプロジェクト支援基金>
学生さんが主体となって企画から乗船までされるということで
応援しています。
<ソーラーボートプロジェクト支援基金>